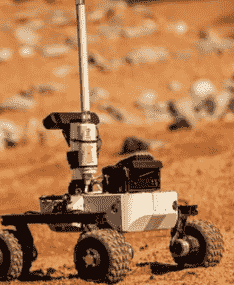
软机器人可用于农业,医学和国防等各个领域。但是,它们复杂的物理特性使其难以控制。当前的模拟测试台不足以充分利用弹性。
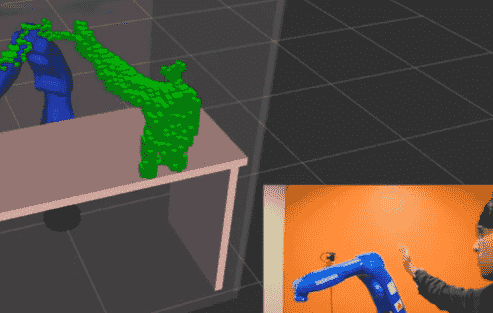
关于arXiv.org的最新论文提出了Elastica,这是一种针对软机器人环境而定制的仿真环境。它试图填补传统的刚体求解器(无法建模复杂的连续体力学)和高保真有限元方法(在数学上比较麻烦)之间的空白。Elastica可用于模拟柔软,细长和柔顺的杆的装配,并与主要的加固学习包进行交互。该图显示了大多数强化学习模型如何学习如何控制软臂并完成相继具有挑战性的任务,例如目标的3D跟踪或在结构化和非结构化障碍物之间进行操纵。

去哪儿今日正式纽交所上市最大融资额1 47亿美元。...

重庆银行H股上市终亮相助力小微企业融资突围。三家...

乳粉行业重组方案已上报国务院待批业界仍有争议。...
众筹平台Kickstarter迎来里程碑发展成功融资项目超...