俄亥俄州立大学和佐治亚理工学院的研究人员团队将折纸这一古老的纸质折叠艺术的可能性扩展到了现代工程应用中,例如不受束缚的机器人技术和变形设备。
研究人员首次展示了具有分布式,不受束缚的控制功能的多功能,磁响应折纸系统。不受限制的磁力驱动将电源和控制器从系统中分离出来,从而实现了可扩展的应用。
研究人员预言,该驱动解决方案可以在复杂的折纸组件上本地和远程应用。该驱动策略实现了无数新应用,从变形机器人技术,卫星技术到生物医学设备。
“通过将编程的磁性软材料分布式集成到双稳态折纸组件中,磁性驱动器具有瞬时形状锁定功能,从而可以独立控制每个晶胞的折叠和展开,从而实现各种机器人运动以实现诸如可调的物理特性和用于数字计算的可配置电子产品,”俄亥俄州立大学机械与航空航天工程系助理教授赵瑞(Renee)Zhao说。
《美国科学院学报》上发表了“具有分布式驱动的功能性折纸微型机器人的不受束缚的控制”研究。这项工作是由美国国家科学基金会(NSF)赞助的。
数十年来,研究人员一直在探索如何在高级工程应用(例如变形结构和设备)中利用折纸折叠技术。然而,大多数致动方法需要与外部刺激的物理结合,并导致配线过多,从而为折纸折叠提供了驱动力。
新的不受束缚的系统摆脱了那些刚性且通常相对笨重的电源的束缚,从而允许更快的速度和多功能结构的分布式致动。
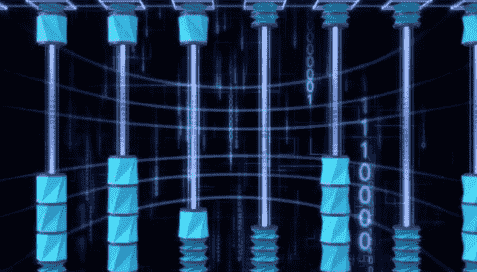
为了证明这一点,研究人员构建了一个以圆柱形折纸图案组成的磁响应材料系统,该图案由相同的三角形面板组成,称为克雷斯林图案。这种模式使气缸壁在轴向或扭转载荷下弯曲。
“ Kresling模式提供了非常丰富的设计空间,这对于将其机械响应与磁响应材料耦合以实现按需,不受限制的驱动力至关重要,包括我们用于数字计算的多功能折纸,” Glaucio Paulino教授和Raymond Allen Jones 说道。 佐治亚理工学院土木与环境工程学院主席 。
通过控制磁场,研究人员能够控制材料折叠和展开的方向,强度和速度。在测试中,研究人员通过瞬时形状锁定功能,以十分之一秒的速度实现了无限的驱动。
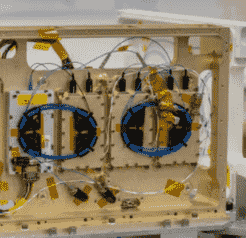
接下来,研究人员将一块磁化板贴在每个克雷斯林晶胞上。这允许他们利用二维磁场通过使用板的不同磁转矩和每个晶胞的独特几何机械特性来同时或独立地致动晶胞。
“多单元Kresling组件是一种折纸机器人,其中双稳态折叠和展开产生机器人运动。它可以被动地感知并主动响应外部环境。通过将电子电路集成到折纸机器人中,它进一步使智能自主机器人具有集成的驱动,感测和决策能力。”赵说。“例如,作用在机器人上的外部压力或外力将触发机器人的被动折叠,表明存在障碍物。然后,机器人可以主动展开并决定下一步行动。”
不受束缚的磁控制力推动了折纸系统的应用范围,这可能会导致下一代仿生软机器人和高级工程应用机器人系统的解决方案。
保利诺说:“我们预计,所报道的磁性折纸系统将超出这项工作的范围,包括未来折纸风格的机器人,变形机构,生物医学设备和外太空结构。”

去哪儿今日正式纽交所上市最大融资额1 47亿美元。...

重庆银行H股上市终亮相助力小微企业融资突围。三家...

乳粉行业重组方案已上报国务院待批业界仍有争议。...
众筹平台Kickstarter迎来里程碑发展成功融资项目超...